| 型号 | ER80B-2565-BD |
|---|---|
| 轴数 | 6 |
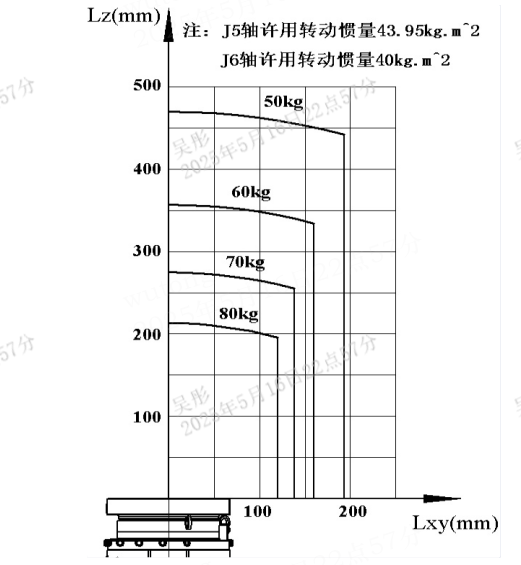
| 最大负载 | 80kg |
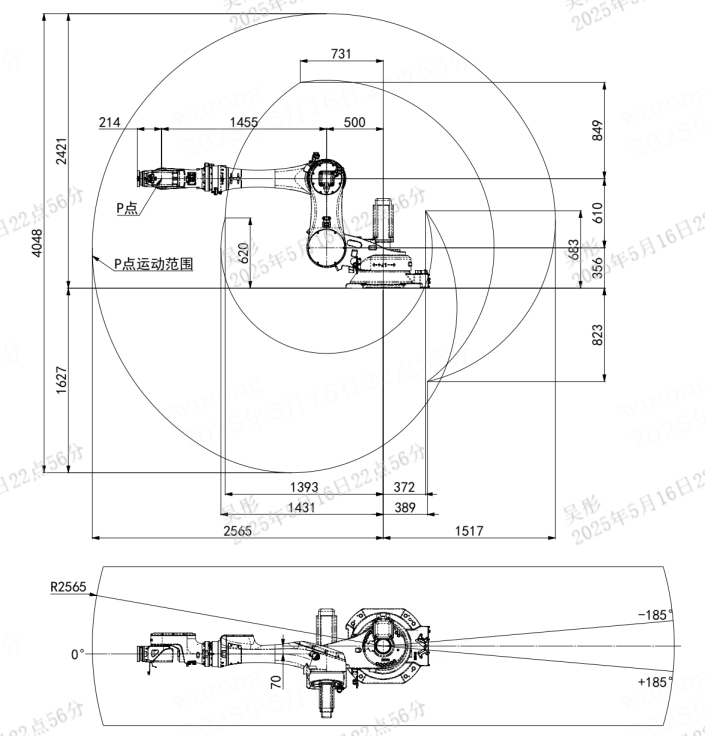
| 最大臂展 | 2565mm |
| 重复定位精度 | ±0.04mm |
| 本体重量 | 730kg |
| 防护等级 | IP54 |
| 安装形式 | 地面 |
| 驱动方式 | AC伺服电机驱动 |
| 安装条件 | 温度:0至45℃ 湿度:20至80%RH 允许高度:海拔1000m以下 振动加速度:4.9m/s²(0.5G)以下 不应有腐蚀性气体 |
| 支持认证 | CE |
| 备注 | 详情请查阅说明书或向我公司咨询。 |
| 关节 | 运动范围 | 最大速度 | 允许负载转动惯量/扭矩 |
|---|---|---|---|
| J1 | -185°~+185° | 114°/s | - |
| J2 | -67°~+150° | 108°/s | - |
| J3 | -190°~+66° | 133°/s | - |
| J4 | -200°~+200° | 255°/s | 43.95 kg·m²/336 N·m |
| J5 | -130°~+130° | 197°/s | 43.95 kg·m²/336 N·m |
| J6 | -360°~+360° | 285°/s | 40 kg·m²/95 N·m |
| 安装参数 | 参数值 |
|---|---|
| 外形尺寸 | 720550850 (mm,长宽高) |
| 控制柜重量 | 160kg |
| 额定功率 | 7kw |
| 参考能耗 | 5.45 kW·h |
| 安装环境 | 通风,非密闭 |
| 最小安装范围 | 250025001200 (mm,长宽高) |
| 工作环境 | 温度:0°~45℃ 湿度:20%~80%RH |
| 通讯方式 | 标配:EtherCAT,Modbus TCP,TCP/IP;选配:Profinet,Profibus,CCLINK,EtherNet IP |
| 互联电缆长度(以厂家业务实际确认为准) | 标配:7米;选配:8米,15米,20米,10米(柔性),15米(柔性),20米(柔性) |
| 至机器人底座电缆预留空间 | 非柔性电缆:≥800mmm;柔性电缆:≥300mmm |
| 动力线缆折弯半径 | 非柔性:≥400mm;柔性:≥200mm |
| 编码器线缆折弯半径 | 非柔性:≥690mm;柔性:≥200mm |
| IO线缆折弯半径 | 非柔性:≥260mm;柔性:≥130mm |
| 至机器人底座重载连接器插头大小 | 1204575.5 (mm,长宽高) |
| 规格参数 | 参数值 |
|---|---|
| 电柜主电源 | 三相 AC 380V-400V,50/60Hz |
| 控制轴数 | 4~6 |
| 储存环境 | 温度:-25°C~55°C;湿度:95%RH 以下(无凝露,无冻结) |
| 绝缘电阻 | 100MΩ 以上 |
| 抗振动强度 | 4.9m/s² |
| 抗冲击强度 | 19.6m/s² |
| 海拔 | 1000 米以下 |
| EMC测试标准 | IEC 61800-3:2017 |
| 防护等级 | IP54 |
| 接口类型 | 参数值 |
|---|---|
| IO线缆接口 | 未定义的输入输出信号接口(24-pin) |
| RJ45接口 | 连接视觉模块的通讯接口 |
| 编码器电缆 | 机器人各轴的电机编码器电缆接口,用于采集机器人位置信号,使用专用电缆连接至机器人本体。 |
| 示教器电缆接口 | 机器人示教器的电缆接口。 |
| 参数项 | 参数值 |
|---|---|
| 液晶屏 | TFT 7 Inch 800*480 |
| 外接USB | 2.0*1 |
| 指示灯 | 指示灯:3个 |
| 通信 | 以太网(100M) |
| 配件 | 急停;钥匙开关;使能开关(三位) |
| 操作环境 | 操作温度:0°C~45°C |
| 存储温度 | -20°C~70°C |
| 示教器线缆长度 (以厂家业务实际确认为准) | 标配:8米;选配:15米,20米 |
| 防护等级 | IP54 |
| 重量 | 1090±10g(不含线缆) |